About this Block
What it does: The Point Attribute block can be used to assign the mass properties to the remote point in the Rigid Connector or Spring blocks. It is used to define the mass and moment of inertia of the component being represented in a structural analysis or optimization study. The image below shows a gripper connected to a robotic arm. The second image shows the robotic gripper replaced by a point mass entity (A) at its center of mass tied to the connection points on the arm through rigid connections (B). The mass of this point (A) is defined by the Point Attribute block.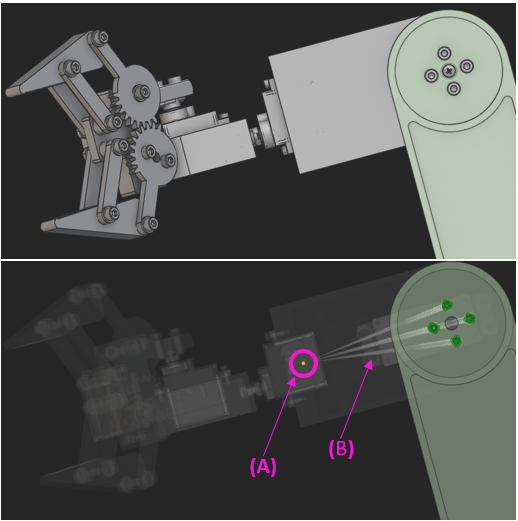 The Point Attribute is added to the first overload of the Solid Domain block to include it in the Simulation Model being analyzed or optimized.
A combination of the Point Attribute, FE Point and the Rigid Connector blocks enables users to define a remote point mass in the Simulation Model through a rigid or flexible connector. Please refer to the Rigid Connector block section of the Documentation to learn about the setup.
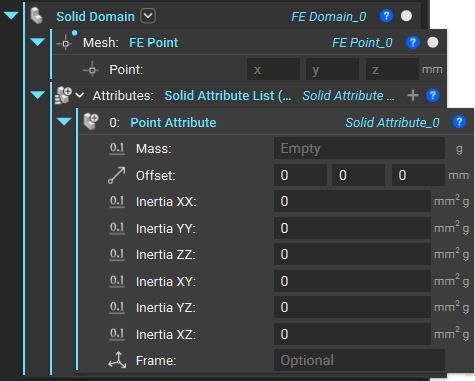
The Point Attribute is added to the first overload of the Solid Domain block to include it in the Simulation Model being analyzed or optimized.
A combination of the Point Attribute, FE Point and the Rigid Connector blocks enables users to define a remote point mass in the Simulation Model through a rigid or flexible connector. Please refer to the Rigid Connector block section of the Documentation to learn about the setup.
 Point Attribute Block
Point Attribute Block
- Offset : The offset is used to specify the center of rotation for the inertia calculations. By default, the center of rotation is at the point defined in the Solid Domain block. This location will be moved from the point by the offset distance specified in this input. This input follows the Frame definition in the block which is the global coordinate system by default
- Inertia ij : This defines the 6 components of the mass moments of inertia tensor
- Frame : The frame is used to define the offset directions as well as the axes used to calculate the mass moment of inertia components
Define material properties as attributes of a Point.
Inputs
| Name | Type | Description |
|---|---|---|
| Mass | Scalar | Mass of the point. |
| Offset | Vector | Offsets the center of mass from the attachment point. |
| Inertia xx | Scalar | Component of mass moment of inertia in XX. |
| Inertia yy | Scalar | Component of mass moment of inertia in YY. |
| Inertia zz | Scalar | Component of mass moment of inertia in ZZ. |
| Inertia xy | Scalar | Component of mass moment of inertia in XY. |
| Inertia yz | Scalar | Component of mass moment of inertia in YZ. |
| Inertia xz | Scalar | Component of mass moment of inertia in XZ. |
| Frame | Frame | The reference frame for defining the location of the point, the offset, and the mass moments of inertia. If not specified, the components are in the global coordinate system. |
Outputs
| Type |
|---|
| Solid Attribute |